 HPH 304TS (Twin Shark)
HPH 304TS (Twin Shark)
 Twin Timber
Twin Timber
 Proxima
Proxima
 FC + Beta
FC + Beta
 FC + FPV Monitor
FC + FPV Monitor
 RC Fligt
RC Fligt
 Timber
Timber
HPH 304TS (Twin Shark)
Twin Timber
Proxima
FC + Beta
FC + FPV Monitor
RC Fligt
Timber
LOGBOOK (2015-2017) | LOGBOOK (2018-2019)
05.11.2025 Podzimní létání převážně s větroněm Twin Shark na Rovinách u Mníšku.
04.09.2025 Během léta létání s větroněm Twin Shark (rozpětí 2700) od Kavana (létání i u Telče), většinou se záznamem letu přes digitální Walksnail. Shark létá moc hezky, dobře reaguje na termiku, lety termikou až do výšky 400 m. Bohužel starší motorák Timber Evolution je, díky nepozornosti pilota při obratech, ode dneška minulostí. Čumáčkem přímo do země a oprava není možná. Tak mi zbývá Twin Timber a jsem na něj hodný. Od Kavana jsem si pro takovéto domácí létání a lety FPV pořídil malý (1500 mm) motorový větroň Alfa V2.
10.7.2025
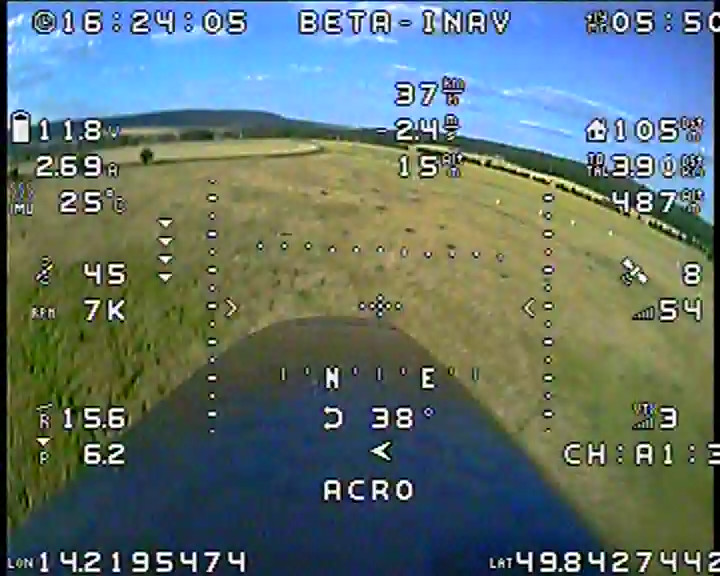
Walksnail kameru a VTX používám z důvodu vysoké kvality záznamu (včetně možné telemetrie v obrazu) i na modelech kde FPV nepoužívám. VTX na SD pořizuje ostré 4k letové video, kvalitnější než pořizuje např. RunCam6 kamerka. FC a GPS modul případně přidám na trup modelu jako senzory pro pořizování telemetrie (obdobně jako při zasílání telemetrie LTM přes LORA) a tak VRX v brýlích uloží krom online full HD videa i telemetrii v OSD.
Používám pro tento účel malý levnější 20x20 FC MicoAir405MINI. Jedním UART je FC připojen k modulu GPS a druhým UART posílá MSP Display Port data do VTX pro OSD. V FC používám firmware iNAV8 a nemám připojen RC přijímač. V iNAV nastavím programové volby, aby se při počtu GPS satelitů více než 4, provedlo "Override RC Channel" na hodnotu nastavenou v µs na tomto kanále v MODE pro ARM a při Ground Speed > 2 m/s se provede ARM při "Override Arming Safety". Takto v iNAV projde ARM i bez zapojeného RC a uloží se GPS Home Position při vzletu. V telemetrii jsou pak správné hodnoty "vzdálenosti a směru domů". FC je sice bez RC signálu stále v failsafe, let ale nijak neřídí.
7.7.2025 Abych při FPV letu nemusel sledovat letové video jen v brýlích, mám z brýlí přes HDMI OUT připojen i malý levný 10'' LCD monitor (1280x600 HD Monitor K0202) na stativu a FPV video/OSD sleduji na něm. Brýle i monitor napájím z jednoho 2200 3S nebo 4S LiPo. Obraz na levném externím monitoru se samozřejmě nedá srovnat s úžasným obrazem v brýlích. Lze sice použít i kvalitnější/dražší náhledový FullHD monitor (např. Redhead 7" 4K HDMI IPS 1920x1200), ale to je pak asi lepší si místo AVATAR FPV brýlí pořídit jen AVATAR VRX přijímač. FPV video/OSD pak zobrazovat z VRX přes HDMI jen na kvalitním externím monitoru místo v brýlích. Což ale na přímém slunci není úplně ono.
5.7.2025 V FPV AVATAR brýlích se na SD krom videa ukládají i soubory (osd a srt) s OSD znaky telemetrie a údajů z video přijímače. Ty je možno při přehrávání videa synchronně k němu mixovat (nebo i s údaji renderovat) např. pomocí free OSD Tool. V přijímači jsou na SD k nahranému videu k dispozici i data z gyra ve vysílači (soubor .gcsv) a video v postprocesu lze letové video stabilizovat/renderovat pomocí free Gyroflow. Je to krásná hračka.
30.6.2025
Digitální přenos letového videa - pořídil jsem Walksnail AVATAR od CaddxFPV. Obraz je z kamerky VTX vysílačem z modelu on-line přenášen přes 5.8 GHz do zobrazovacích brýlí s VRX přijímačem až ve full HD (1920x1080). Video je možno ve VTX zaznamenat na SD až v 4k (3840x2160) a do 100 fps. VTX AVATAR Moonlight Kit s výbornou minikamerou mám připojený přes UART k FC s iNAV8. Přes UART jsou do VTX z FC přes MSP Display Port protokol přenášeny OSD znaky s letovou telemetrií a mixovány do obrazu k letovému videu. Nastavení iNAV OSD pro Walksnail je např. tady nebo tady. Napájení Walksnail VTX je z FC VBAT, tedy z připojeného letového 3S-6S AKU k FC. Váha vysílače i s kamerkou je cca 40g. U FPV video přijímače zabudovaného do zobrazovacích brýlí je vhodné vypnout proximity senzor, aby brýle nemusely být stále na obličeji (jinak se obraz vypne). Brýle mají HDMI vstup a výstup a obraz ze zaznamenat na SD v brýlích až ve full HD a až do100 fps. No prostě nádhera. A dosah několik km (asi). Oproti na pár stovkách metrů zarušenému analogovému 640x480, je toto reálný letový obraz použitelný pro řízení modelu.
Při nastavování FC a VTX je VTX nutno aktivně chladit malým (12V) větráčkem. Bez aktivního chlazení je po cca 4 min vysílač rozžhavený na 90 stupňů a vypne se. Při letu je VTX na modelu letadla chlazen proudem vzduchu a vše je OK, ale jak se to chladí na dronu při pouhém vznášení..asi moc ne.
20.6.2025 Opět trochu testu komerčního FC a FPV - FC SpeedyBee Wing MINI s free fimware iNAV (verze 8.0.). Zapojení již klasické - UART1 RC přijímač Serial SPEKTRUM (SRXL2), UART2 RX ESC telemetrie ( ESC Aria 35 + BL Heli32 s DSHOT), UART3 GPS a UART4 výstup LTM telemetrie do vysílacího LORA modulku. Oproti většímu SpeedyBing Wing APP, který jsem na Betě měl dosud, je deska MINI kompaktnější, výstupy dostačující (pro UART jsou zde též JST konektory, ale na LED pásku se výstup musí napájet). Nechápu u všech výrobců FC pro WING, proč rovnou nezapájí pinové vývody k serverům a motorům, toto pájení pinových ježků je pěkný opruz. Firmware INAV jsem nastavil dle zkušeností a brzy si dám zálet. Chystám se utratit nějaké ty "drobné" za digitální FPV - Walksnail Avatar od CaadxFPV. Ten "příšerný" analogový obraz pro FPV už mě neba.
13.6.2025 Zálet větroně HPH TwinShark - naprosto v pohodě. Jen dodané servo u výškovky občas flapuje a tak ho měním. A vzhledem k použití 4S 4000 ( tady doporučují lehčí 3000, ale mám několik 4000) jsem dovažoval záď a model má nyní vzletovou cca o 60g více než maximální výrobcem uvedenou + ještě kamerka RunCam 6. Ale létá pěkně, poslušně, na termiku reaguje. A ještě polétávám akro s dvoumotorovým Twin Timberem. Bude zase potřeba posekat letiště..
6.6.2025 Zvažuji nákup nějakého větroně místo opálené Proximy (model Fascination s rozpětím 3,6m od Topmodel jsem si v zimě pořídil, ale ještě nesložil). Zvolil jsem bublinkovou (EPO) polomaketu českého 20m větroně HPH 304TS (Twin Shark). Model vyrábí Kavan a má v rozpětí 2700 mm. S Betou od Kavana ČR (dříve Pelikán) jsem spokojen (používám ji na FPV) a i tento model je na bublinky poměrně pěkně proveden. Má bytelné uchycení křídel, škoda že ještě nedoplnily pevné propojovací konektory. Model byl hotov a je s digitálními servy i C3547-750 motorem. Osazený ESC Kavan jsem jen vyměnil za 45A Avian Spektrum (s výstupem ESC telemetrie) a doplnil přijímač Spektrum AR6610T (s variem), kterážto elektronika přežila hoření Proximy. Jsem zvědav na zálet.
30.5.2025 Po pohodovém jarním mnohém polétáváním s Twin Timberem a plachtění s Proximou jsem nabíjel LiP AKU v její blízkosti. Bohužel trochu již poškozený AKU se nafoukl, praskl a začaly z něj šlehat metrové plameny. Nejvíce požár odnesla Proxima, jedno dýhové křídlo je spálené a zánovní laminátový trup také. Je to neopravitelné. Tím Proxima u mě definitivně skončila neb Reichard Models již žádné své models nedělá a křídlo není možné jednoduše nahradit. Trup už víceméně také ne - na tento, nyní dozlatova opálený, jsem čekal půl roku.
14.5.2025 Zálet Proximy s došlým novým trupem od Reichardů a létání s Twin Timberem na čerstvě posekaném letišti.
10.2.2025 Občasné zimní létání s Betou a FC.
30.10.2024 První lety s již složeným Twin Timberem.
20.09.2024 Pozdně letní létání s Timberem na vysekaném letišti u Kytína. Všechna přistání zdařilá :-).
17.08.2024 Chudinka Proxima přišla o čumáček. Během letu se uvolnil AKU, vyskočil z kabiny a ve visu za kabel zalehl v letu křidélka a klapky na jedné straně. Pilot mohl jen sledovat jak se větroň ve spirále řítí k zemi. Křídla bez úhony, ale trup je v přední části neopravitelný. Nevím zda u Reichardů budou mít náhradní trup, ukončily výrobu. Asi jako náhradu objednám Fascination (rozpětí 3,6m) od Topmodel. Již jsem po něm pokukoval dříve. Z Proximy zkusím křídla nějak zužitkovat nebo doobjednat nový trup.
10.08.2024 Pohodové létání s Betou + FC + iNAV u Telče. FC i telemetrie fungují OK.
25.07.2024 Update přijímače LTM Telemetrie přes LORA na větší display TFT 480x320 s více údaji (LORA Telemetry Receiver) a update dekodéru datového LTM souboru z přijímače (LTM Reader). Dump konfigurace INAV pro desku FC F405 SpeedyBee. Ještě si pohraji s Ground Station a protokolem MAVLink a tady. Zkusím něco i s ArduPiotem a pak začnu opět více létat. Nejlépe bez FC a telemetrie :).
11.07.2024 Připojením směrové antény TRIPLE FEED PATCH 5.8GHZ (GEPRC) k přijímači se příjem analogového video signálu z modelu výrazně zlepšil. Dosah je v přímém směru až 1km s poměrně slušným obrazem. Začínám ale pokukovat po digitálu :-).
10.07.2024 Ne Betě jsem zaměnil FC Matek (STM32F405,168MHz,1MB Flash) za FC od SpeedyBee WING APP. SpeedyBee FC má zabudované BL/BLE/Wifi a pro Android aplikaci. Z mobilu tak lze tento FC konfigurovat bez USB kabelu přes BLE, BL či Wifi a vytvářet či aktivovat soubory pro mission. Vyzkoušel jsem při letech s Beta NAV mody (musí být aktivní alespoň ANGLE/HORIZON). Zejména dávám lety dle kurzu a ve stálé výšce (CRUISE), lety dle GPS souřadnic ze souboru missions (WP) a ReturnToHome (RTH). Oblíbené je "parkování" (kroužení na místě v přednastavené výšce) pomocí modu LOITER. Letové mody spolehlivě fungují. Pro testy FPV a příjem videa na 5.8 GHz doplním k FPV přijímači (obraz se od cca300 m často ztrácí) směrovou anténu TRIPLE FEED PATCH 5.8GHZ od GEPRC. Zvyšovat výkon video analog vysílače na modelu nebudu. Digitální přenos videa by byl pro FPV skvělý, ale zatím je vybavení DJI nebo Caddx Walksnail AVATAR drahé. FC jsou nyní již s STM32H743 (480MHz , 512KB RAM, 2MB Flash), ale pro přenos analog videa a řízení WING modelů F405 více než stačí. Pozn: Při nabíjení 3S LiPo se dnes AKU začal podezřele zahřívat a nafukovat, stačil jsem ho vyhodit oknem a za 5s následoval výbuch a 2m plamen (!!). Uhasil jsem hadicí s vodou, ale bylo to o fous .. ještě že jsem u toho byl.
28.06.2024 V opakování svých experimentů s leteckou telemetrií a FPV z FC na modelu pokračuji reinstalací novější verze mwptools do virtualizovaného Linuxu na NB s Windows 11. Je to popsáno v popisu FC Upravím také svoji LoRa LTM Ground Station pro větší 4'' TFT display.
25.06.2024 Zálet modelu Bety s FC sestavou elektroniky exhumované a zapojené v minulých dnech. Může to být v době digitálního přenosu videa FPV (DJI, Walksnail Avatar) trochu anachronismus, ale proč ne. FC připojuji k AKU, zapínám si analogový analog FPV monitor a na SD kartu v FPV monitoru spouštím záznam videa z palubní kamerky s OSD údaji telemetrie. Taktéž si zapínám záznam telemetrie LTM do souboru na SD v Ground Station přes LoRa. Čekám až GPS "nachytá" alespoň 6 satelitů, povoluji pro FC ARM, roztáčím vrtuli a model odhazuji do vzduchu v modu MANUAL. Tady se nekoná žádné překvapení, BETA je poslušná. Vypínám MANUAL a aktivuji tím stabilizaci modu ACRO/RATE. FC přebírá kontrolu nad výchylkami řídících ploch, kontroluje signál z gyra a v případě nechtěných rychlých změn pohybu (např. nárazy větru) se snaží pomocí serv řídících ploch vrátit model do původní polohy a let stabilizovat. Model mi ale jde do prudkého náklonu a je více než nestabilní - asi jsem FC špatně orientoval na trupu nebo mám špatný směr výchylek. Rychle přepínám zpět na MANUAL, vyrovnávám a přistávám. Připojuji INAV konfigurátor k FC - no jo, je to tak, špatný směr výchylek pro stabilizaci. Nastavuji vše tak, jak má být. Další let, vypínám MANUAL, super model je stabilizován. Zapínám mod ANGLE/HORIZON, FC ke gyru bere v úvahu i signál z akcelerometru a snaží se regulací křidélek a výškovky držet stabilní vodorovný přímý let. Náklony letu mohu ovládat i z RC vysílače, ale jen do určité míry (ANGLE) resp. od určitého prahu náklonů se tato regulace vypne (HORIZON) pro možnost akrobacie. Výška regulovaná v těchto modech není a směr je ideální ovládat jen směrovkou, kde zůstává RATE. Funguje to pěkně, mírně doladím v nastavení PIFF. Na FPV monitoru občas sleduji letový obraz z palubní kamerky mixovaný se znakovými údaji telemetrie. FPV let nedávám. Přistávám hladce v modu ACRO. Mohu si přehrát historii letu a datové údaje ze zaznamenaného videa i z dat Ground Station. V datech Black Boxu z SD v FC bych se mohl navíc hrabat v údajích z gyra, akcelometru, barometru, reakcí FC regulátoru a porovnávat praxi s teorií. Příště navigační mody lety dle Way Points.
24.06.2024 Ještě dolaďuji u FC FPV analogové video s OSD - na monitoru rozmisťuji umělý horizont a hodnoty varia, výšky, kursu, GPS rychlosti, GPS pozice, doby letu, směru a vzdálenosti k místu vzletu. Dále se mi zobrazují hodnoty palubního napětí a proudu z AKU, teploty procesoru, hodnoty plynu, otáček motoru a náklonů pitch/roll. Toto vše též bude přes LoRa zaznamenáno do SD v Ground Station. Navíc se další údaje z FC budou nahrávat i na SD kartu BlackBoxu FC. Je to jako příprava na start raketoplánu, ale mě to docela BA.
20.06.2024 Exhumuji své letové kontrolery (FC). Do Matek F405 Wing flashuji nejnovější firmware INAV (7.1.2) a desku FC upevňuji na trup Bety za kabinku před pilon s motorem. K sériovým portům FC připojuji GPS modulek Betian (UART4), RC přijímač SRXL2 (UART6) a LED pásek. Na video I/O FC připojuji kamerku Foxeer a video vysílač VTX Trump na 5.8 GHz pro zobrazení letového FPV videa s OSD telemetrickými údaji na pozemním monitoru (Sky 700D). Pro úplnou sestavu připojuji k sériovému portu (UART3) i LoRa vysílač pro zasílání LTM telemetrie přes 868 MHz pro záznam do "Ground Station". Doplněným otvorem od desky FC do vnitřku trupu protahuji přívody serv, vstupu regulátoru ESC (Aria 35 s BL Heli32) a napájení FC z 3S AKU. K USB připojuji konfigurátor INAV a nastavuji potřebné parametry, vhodné zisky PID/PIFF a testuji správné směry výchylek při stabilizaci. Jako ESC protokol použiji DSHOT150 a datová výstup ESC připojuji na sériový porty (UART2) pro možnost získání telemetrických údajů z ESC (otáčky motoru). Pro možnost nastavení kanálů a parametrů VTX připojuji na poslední volný sériový port (UART5) vstup z VTX Trump. Model je teď pěkně zadrátovaný a vypadá trochu jak "pekelný stroj". Příště zkusím, jak se elektronické regulační a zobrazovací soustrojí bude chovat za letu.
25.05.2024 Stavba Twin Timber (zatím nezalétán) a Bety od Kavan pro FPV/FC. Létání s Cirrus, Timber a zalétávání Bety bez FC.
10.05.2024 Sekání letiště na Babinské, v dubnu létání s Cirrus a Timber na Babinské. Úprava přední nohy Cirrus a větší kola pro rozjezdy na trávě.
28.03.2024 Létání s Proximou a Timber. Sekání letiště na Babinské.
25.02.2024 Létání s Cirrus (ztráta kabiny s RunCam :-() a Timber (výměna poškozeného podvozku). Bezproblémový zálet Proximy. Zrušení dvoumotorového Twinstar. Uvažuji o dvoumotorovém TwinTimber.
01.01.2024 Občasné zimní více či méně akrobatické létání s Timber a Cirrus.
01.11.2023 Jako náhradu za (snad zatím) nenalezený Nimbus stavím opět větroň Proximu (2700) od Reichard Modelsport. Zatím bez záletu.
02.10.2023 Pilot se ztratil, zazmatkoval a Nimbus mu odletěl s plnou výbavou neznámo kam do mníšeckého okolí. Dlouhé hledání bylo bezvýsledné :-((.
25.09.2023 Bravus je již minulostí. Pěkné plachtění s Nimbus po celé pozdní léto.
29.07.2023 Místo Solius si pořizuji větroň BRAVUS s rozpětím 2400 od Pelíkána. Zálet OK za mírného větru. Model zatím poslouchá, jen občas zamává poměrně štíhlými křídly. Celkově je model velmi chatrně proveden. Nebyla to dobrá koupě.
23.07.2023 Nějak se v poslední době nevede, po mnoha krásných letech se Solius (s trupem Heron) rozhodl v cca 40 m jít do vývrtky a zabodl se do pole. Ani nevím přesně příčinu, pád nízko nad zemí se mi vybrat nepovedlo. Příď již nelze opravit a motorový větroň Solius musím z letky vyřadit.
20.07.2023 Letová kamerka Firefly Q6 odmítá poslušnost. Vydržela toho dost. Pořizuji si nové kamerky RunCam2 4K a Caddx 4K FPV.
10.07.2023 Létání s větroni Solius a Nimbus v horkých letních dnech na louce poblíž Kytína. Nimbus měl na mále, po stoupáku do 700 m a rychlejším sestupu se mu odtrhla serva křidélek a následoval pád do vývrtky. Několikasetmetrový pád skončil v měkkém podloží lesa a modelu se kupodivu, krom vylomení motorové přepážky, nic nestalo. Již opraveno a Nimbus znova létá.
10.06.2023 V průběhu několika dnů, v poslední době nějak rozptýlený a nesoustředěný pilot, přišel o Cirrus i Habu (příliš rychlé přistání). Dvouplošník Boening ušel rozbití jen taktak (měkké přistání na vrchol smrku a pád do mechu a kapradí). Důkladná oprava.
03.05.2023 Vysekávám nové travnaté "letiště" poblíž Kytína. Na původní ploše se vyřádila divoká prasátka a je víceméně nepoužitelné.
25.04.2023 V HABU měním motor a dmychadlo (2847/3200kV + EDF 70/10 lopatek) za tyto komponenty z rozebraného Viper (2860/1850 kV + EDF 70/12 lopatek). Měním tam též ESC (70A pro 3-4S) za ESC 70A pro 6S. V HABU místo 4S AKU nyní používám 6S AKU. Změna si vyžádala menší úpravy a uchycení části trupu. Na výkonu JET modelu je změna dmychadla a napájení výrazně znát.
23.02.2023 Modifikuji uchycení přední nohy u Twinstar.
09.02.2023 Přední nohu u Twinstar měním na říditelnou - nové táhlo a servo na AUX1 + MIX AUX1/RUDD). Funguje výborně. Menší pád (AKU na mimimu a výpadek pravého motoru), oprava křídla.
22.01.2023 Na dvoumotorový Twinstar doplňuji podvozek a přední nohu.
20.12.2022 Prosincové létání s Cirrus a Habu u Čisovic.
17.12.2022 Napadl sníh - létání s Timber a lyžinami s rozjezdem na sněhu u Mníšku.
10.11.2022 Opouštím vysekanou travní letištní plochu u Kytína, kterou nyní poryli divočáci. Přesunuji vzlety a přistání s motorovými modely na plochu poblíž Čisovic. Je mimo dosah obytných domů a částečně asfaltová. Zalétávám s Cirrus a Habu.
15.10.2022 Slunný podzim přeje létání s větroni. Létám tyto dny se Solius a Nimbus na Rovinách a u Zlaťáku.
30.09.2022 Kolize s Timberem - za letu se uvolnilo táhlo k servu a Timber přistál přímo v Kytíně na jednom domu. Trochu přitom promáčkl zateplení jednoho domku, což majiteli opravím. Timber víceméně přežil bez úhony, jen se zlomenou vrtulí a výškovkou. Asi na létání s motoráky změním letiště. Kytín se rozrůstá do míst, kde byla dříve pole.
10.09.2022 Pořizuji hornoplošník Timber Evolution od E-flite. Mé dřívější bednoidní hornoplošníky už jsou většinou rozebrané (např. Cessna) a tento typ modelu mi v letce už scházel. Timber má promyšlenou konstrukci, klapky, poměrně velký podvozek s ostruhou a vypadá celkově bytelně. Má rozpětí 1500 mm, 400W motor s 800kV, digitální serva, Spektrum přijímač AR637T, což ve spojení s ESC Avian 60W umožňuje příjem telemetrie na mém vysílači Spektrum. Pokud chci snímat i data z GPS, musel bych doplnit GPS modul k XBUS příjímače nebo namontovat své udělátko z FC a příjmem LTM přes 433 MHz LoRa. Ale tady k telemetrování závratné rychlosti či výšky a dálky či trasy není moc důvod. Model jsem zalétal a létá spolehlivě /je vhodné mít těžiště o něco blíže k náběžné hraně než předepsaných 60mm/. Aku používám 4S 3000-4000.
30.08.2022 Létání se Solius v okolí Telče. U Kytína sekám letiště a létám s Cirrus a Habu. Rozebírám Viper - ulomil jsem mu špičku (náhlé vybití AKU) a bylo by poztřeba nový trup.
24.07.2022 Provětrání Cirrus (s LTM) a posekání letiště.
16.07.2022 Letní létání se Solius (2 x 20 min). Upevnil jsem na trup LoRa vysílač na 433 MHz připojený k FC Kakute F4V2, flashnutý posledním BetaFlight ver 432. Používám pro zobrazení a záznam telemetrie přes LTM na pozemní stanici s možností pozdějšího vyhodnocení/zobrazení. Pozemní stanice viz LMT RECEIVER v sekci Technology.
03.07.2022 Doladil jsem výchylky a těžiště pro Solius. Zálet, teplota 28 stupňů. Docela to neslo, až byl problém opustit stoupák pod mrakem.
01.07.2022 Složil jsem Solius z Solius křídel co jsem měl ve skladu a dokoupeného trupu k Heronu. Osadil jsem motorem AXI 2820/12(990kV), a digitálními servery 2x EMAX ES08MD na křidélka a 2x ES08D na výškovku a směrovku. Váha 1280g, AKU 3S/3300 nebo 3S/2600. Létá výtečně.
20.05.2022 Po jarozimním poletování s Twinstarem, Herostarem a s Cirrusem jsem se odhodlal poprvé odhodit Nimbus. Na první zálet celkem slušné, po hodu se vzpínal, bylo nutné doladit výchylky a vytrimovat. Možná bude nutné více potlačit motor.
02.01.2022 Poletování s Cirrusem. Teplota kolem 10°.
10.12.2021 Poletování a rozjezdy Twinstar s lyžinami na čerstvě napadaném sněhu. Teplota kolem nuly.
25.11.2021 Po vyvažování a "pozemním" testu Nimbus jsem motor AXI2820/12 vyměnil za AXI2826/10. AKU budu používat 4S/3700. Sklopná vrtule zůstává 12x6. V této konstelaci je Nimbus vyvážený bez nutnosti někde doplňovat závaží a jeho výkon díky silnějšímu motoru i AKU bude mít větší rezervu. Při statickém měření s vrtulí nepřesahl odběr nového motoru 50 A při maximu plynu. Při letu bude max. odběr cca o 25% nižší a ESC na 45A bude dostačovat. Při současném počasí je zálet v nedohlednu.
12.11.2021 U JET Viper jsem vyměnil trup a výškovku (náhradní díly) kteréžto již byly po několika nepovedených přistání dost pokřivené. Nový trup jsem vyztužil v přídní části 4 mm uhlíkovými tyčkami. Vyčistil jsem EDF. Viper nyní létá výborně a pilot se více snaží při přistáních na trávu. Přední podvozek je zatím jen otočný, sklápění doplním později. Ukončil jsem stavbu Nimbus, krom zalepeného tunelu pro kabely serv v jednom křídle, nebyl při skládání žádný zádrhel. Nimbuse čeká vyvážení a zálet. Počasí na zálet zatím není.
13.10.2021 Pořídil jsem si Nimbus od Reichard Modelsport. Rozpětí 3600, délka 1600, váha kolem 2,5 kg. Osazení bude 4x HS-125MG na klapky a křidýlka, HS-85MG výškovka a HS-82MG na směrovku. Snad to se servy nedopadne jako u Laguny. Motor použiji AXI2820/12, ESC Avian 45A BL s přijímačem přijímač AR6610T. Sklopná vrtule Aeronaut 12x6.5. LiPo AKU předpokládám 3300 3S.
1.10.2021 Létání s HABU. Telemetrický přijímač LTM s LORA vyvíjím a zkouším s MCU STM32 (BluePill) a TFT+SD Card. Na menší barevný 160x120 TFT display se vejde mnohem více údajů než na malý OLED.
20.09.2021 Letecká katastrofa - během letu v cca 200 m, krátce po startu, se Laguna náhle sklopila přídí k zemi a zcela neovladatelně a při plné rychlosti zamířila střemhlav do pole. Příď se zaryla 10 cm do země. Všechna serva byla sice po nárazu poškozena, ale s největší pravděpodobností servo výškovky (HS-55) se zaseklo. Model je bohužel neopravitelný, kupodivu přežil motor AXI. Laguna byl moc hodný a pěkný model, takový konec během cca 3 s si po měsíci létání nezasloužil. Poučení - nepoužívat levnější serva u dražších modelů.
05.09.2021 S Lagunou večerní létání u Kytína, bezvětří, TLM z LTM+Kakute.
28.08.2021 Krátký zálet Laguny zcela bez problémů. Létá nádherně. Jen musím oříznout spodní stranu kormidla pro možnost větší výchylky výškovky.
25.08.2021 Sestavení 3 m větroně Laguna (cca 2,5 MD). Serva a motor z rozbité Proximy - 4xHS81, 2xHS-55, motor AXI2820/990kV, ESC45A FOXY. Všechny serva přilepeny, serva pro výškovku a směrovku umístěny vzadu. Při LiPo 4S 3300 jsem dovažoval ještě 250g vpředu (!). Křídlo je třídílné. Jsem zvědav na zálet.
06.08.2021 Létání se Solius u Telče. Po krásném 30 min letu díky nepozornosti pilota pád v dáli do pole brambor nebo kukuřice. Jako na potvoru zrovna nezapisovala GPS (ta od Spektra). Ani s dronem se mi už model nepodařilo najít. Mrzí mne ztráta ka merky MOBIUS a GPS modulu. Model jako by se vypařil. Dorazila stavebnice třímetrového větroně Laguna od Kostky, který mi ji osobně přivezl do Telče.
24.07.2021 K starší olezlé FC desce Omnibus F4ProV3 flashnuté iNAV (nebo Betaflight) připojil modulek GPS, vysílač LoRa (E32-TTL) na 433 MHz a LED strip. Lze použit jakýkoliv mini FC pro drony (20x20 mm), ideálně s baro a storage pro záznam blackbox. Používám to pro posílání LTM telemetrie (FC je bez funkce stabilizace). Na pozemní stanici přijímám LTM přes modul LoRa přijímače s SMT32 s vlastním firmware pro LTM dekodování, zobrazení na TFT a nahrávání dat do souboru na SD.
18.07.2021 Lety s FC Matek + s iNav ve verzi 3.0 na Herostar. Stabilizace, navigační mody a telemetrie přes LoRa. Vše pracuje výtečně. Výměnil jsem u Herostar serva u křidélek za digitální (ES08D).
28.06.2021 Po delší době jsem proletěl Thunderbolt a Cirrus. Oproti JET modelům s dmychadlem se let s modelem s vrtulí jeví jako odpolední čajíček.
21.06.2021 Kompletní rekonstrukce přídě na JET Viper, včetně předělání řízení příďového kola. Čiňan toto strašlivě odbyl.
15.06.2021 Večerní pohoda s Proximou se změnila v její konec. Z pěkného klouzavého letu nastal náhlý propad do vývrtky, pokusy o vybrání nezabraly a větroň zapadl plnou rychlostí čumákem do vysokého porostu na poli. Po delším průzkumu dronem se ho povedlo objevit. Křídla i trup zlomená, oprava konstrukce je víceméně nemožná. Při pádu se oddělila kabina s kamerou a zachytila padající model a příčinu pádu - odlepená výškovka (myslel jsem, že k tomu došlo při nárazu). Objednávám třímetrovou Lagunu od Kostky Jihlava a pořádám večer padlých modelů v Kytíně.
02.06.2021 Pro HABU, konečně nastalo pravé létací počasí. Po domluvě s obcí používám původní "letiště". Uchycení předního podvozku u HABU modifikováno z plastu na překližku.
31.05.2021 Dokončen příjímač telemetrie. Přijímaci station je tvořena MCU ESP32 VROOM32D + LoRa modul (k ESP2 UART interface) s anténkou na 433 MHz + OLED (I2C interface) + SD čtečka (SPI interface). Napájeno z malé LiPo. Pomocí firmware v ESP32 se přijmutý LTM datastream dekóduje a hodnoty telemetrie zobrazují na OLED a zapisují na SD. Ponechal jsem přeposílání LTM dat na Bluetooth (ESP32 BT obsahuje) a tak je možno data zobrazovat pomocí appky na mobilu (např. EZGUI, má i zvukový výstup) či v mwptools na NB. Pokud se model odporoučí mimo dohled a nezafunguje RTH či failsaf, poslední přijmutá telemetrická data (zejména GPS) jsou dostupná na OLED nebo na SD
21.05.2021 U pokusného HeroStar doplněna telemetrie přes LoRa na 433 MHz s E32-TTL (viz 12.3.2021). Přijímací LoRa modul propojen přes UART na ESP32 TTGO s malým OLED display. Do ESP32 jsem naprogramoval firmware na "dekódování" LTM protokolu. Na display lze zobrazovat náklony (horizont), GPS, baro výšku, GPS rychlost/výšku, palubní napětí i proud a dopočítávanou vzdálenost od home position, kurs a home head. LTM stačí z FC v minimálním toku dat, data mi postačuje zobrazovat v intervalu 1s. ESP32 TTGO obsahuje Bluetooth a přijmutá telemetrická data lze i přeposílat přes BT na GS. Místo BT doplním přímý zápis dat na SD kartu. ESP32 TTGO má i LoRaWAN na 868 MHz. Pokud je v místě signál LoRaWAN, lze data ve větším intervalu přeposílat do LoRaWAN. Odtud pak přes callback zaznamenávat na síťový server. Takový "on-line blackbox".
09.05.2021 Ne že by se v květnu výrazně oteplilo, ale na létání s JET HABU to bylo. Na HABU jsou jen potíže s příďovou nohou, stále ji musím nějak upravovat. Ale model létá pěkně a není až takový rychlodivoch jako Viper.
26.04.2021 Let Commander na Podejčinách. Klasická chybka, nízká rychlost, náklon nízko nad zemí, přechod do vývrtky a z přídě byla ve chvíli harmonika. Trup již nebudu opravovat. Kdyby někdo chtěl poměrně zachovalá křídla nebo ocasní část, může mne kontaktovat. Při pádu ztracenou kamerku Mobius jsem našel na poli až druhý den po více úspěšnějších letech s Jet Habu.
30.03.2021 Provětral jsem JET Viper, po zimních ploužácích s Twinstarem je to s dmychadlem kvapík.
26.03.2021 Je 16°C a tak jsme s jarem dorazili na letišťní louku s Commanderem. Tři vzlety po 8 min a lehká akrobacie. Celá louka je nyní ohrazena, nikoliv proti prasatům, ale prasáckým autům, které to tam během zimy hustě poryly. Navíc je tu čerstvý zakáz vjezdu asi dodaný obcí. Poohlédnu se ai po jiné "letištní" ploše.
13.03.2021 Opět telemetrie, nyní s radiomodulem RA-02. Tento LoRa modul má SPI rozhraní. Desky FC většinou přímo SPI nemají, "konvertuji" SPI na UART přes Arduino Mini 3.3V s využitím této skvělé knihovny. Modul RA02 je menší než E32, oba obsahují radiový čip od Semtech. Napájení je 3.3V a odběr při vysílání do 100mA. Protokol LTM generuje maximálně desítky bps. Rychlost přenosu dat je dána nastavením SF parametru (6-12), šířkou pásma (125/250 kHz) a CR (coding rate). Čím vyšší SF, tím je vyšší citlivost a dosah, nižší datová rychlost, delší time air a vyšší spotřeba radia. RSSI je při SF7 -125 dBm a při SF12 až -140 dBm. Dosah telemetrie s LoRa je i při malé anténce pro 433 MHz slušný (1-2km) a přesahuje vzdálenosti letů při viditelnosti modelu. Výkon radia modulků je nastavitelný do 20dBm (100mW), používám do 10 dBm (10 mW). Sestava je spíše test technologie. Možná LoRa (nebo LoRaWAN) použiji k zasílání GPS souřadnic z "black boxu" při "letecké katastrofě".
12.03.2021 Konečně jsem se dokopal k testu příjmu letové telemetrii přes 433MHz LoRa z FC Matek F405 / iNAV 2.60. Celé soustrojí zobrazuje letové hodnoty, včetně umělého horizontu. Komunikace je přes Lightweight Telemetry (LTM), které iNAV výboně podporuje. Radiové modulky je E32-TTL. "Vysílací" modul je (přes RX 1k) na UART1 (9600 bps) desky FC a přijímací na UART BT modulu HC-06. Přes BT připojuji NB s MWPTOOLS běžícím na Linux Ubuntu18. Linux je ako virtuál ve VMWare Workstation na Windows10.
09.03.2021 Virouši s korunou zase řádí, nicméně létání to zatím nevadí. Během týdne létání s Twinstarem a Habu u Kytína a Herostarem u Zlaťáku.
25.02.2021 Oteplilo se až na 15°C, polétávám s Herostar s FC Matek (ladím PID) u Kytína, na Rovinách i u Kovohutí. Polepil jsem křídla bílou samolepící folií od Kopyta a vypadá jak nový.
10.02.2021 Nástrahy zimního létání se projevily. Při pěkném polétání nad sněžnými pláněmi za mrazu s Twinstarem, se mi náhle zamlžily brýle a než jsem se rozkoukal, Twinstar zmizel v bílu. Hned jsem vypl motor a trochu potlačil a naštěstí po hodině jsem Twinstar ve sněhu dohledal. Samozřejmě mnohem dále, než jsem čekal. Těsně před pásmem lesů. Má pochroumané křídlo a lyžiny. Bude co opravovat. Musím dodělat on-line GPS přes LoRa a doladit RTH.
20.01.2021 Napadl sníh a nemrzne. To je čas pro lety dvoumotorovým Twinstar + FC s rozjezdy a přistáním na lyžinách na sněhových pláních u Kytína. Teplota kolem 5°C, polojasno a fouká. Několik letů po 10 min v různých FC letových modech (MANUAL, RATE, HORIZON, CRUISE, ALTHOLD, POSHOLD, RTH) se zápisem parametrů letu na SD BlackBoxu pro další poladění parametrů iNAV. Stabilizaci FC jsem ocenil v zesilujícím větru.
10.01.2021 Nastala zima, mrzne, létat se nedá a tak se zase více zabývám FC. Vyřadil jsem obě desky Omnibus (F4V6 a F4Pro) a pořídil ještě jednu desku Matek F405-WING, která funguje spolehlivě. Upevnil jsem ji do kabiny dvoumotorovéhoTwinstaru. Starší F405 mám na "HeroStaru". Od MATEK je již spousta nových desek s novějšími MCU STM32 (H743) s více I/O (PWM/UART/SPI) a dokonce i CAN. Ale jsou dražší, těžší a jejich "nadupané" vlastnosti zatím nevyužiji. Jako firmware používám stále zejména iNAV, nyní ve verzi 2.6.0, která již podporuje RC protokol SRXL2 (používám SPM4650).
26.12.2020 Sněhové vánoční vzlety s Viperem se moc nepovedly, po startu se Viper převrátil doleva a šup k zemi. Možná poměrně silný vítr nebo špatná předstartovní příprava.. Zlomila se komplet příď a bude po delší době opět co opravovat. Alespoň při tom dojde na úpravu úchytu předního kola.
06.12.2020 Registrace amatérských pilotů a provozovatelů bezpilotních letadel - modelů/dronů - je konečně tady na www.caa.cz . Evidence jsou dvě, pro provozovatele (registrační číslo CZExx - musí být nalepeno na každém dronu/modelu s kamerou nebo nad 250g) a pro piloty (CZE-RP-xx - obsahuje navíc splnění testu a platí 5 let). Složit online test, tedy alespoň 30 správných odpovědí ze 40 otázek za 60 minut, se mi povedlo na potřetí, zato za 25 min. Pár záludných dotazů se tam objeví, např. co to je "shromáždění osob" nebo "jaká poziční světla má mít Open dron v noci". Trochu triky je rozdělení Open kategorie na podkategorie provozu (A1-A3) a typu letadla dle váhy(C0-C6). Online test platí jen pro A1&A3, což znamená plný zákaz přeletu "nezapojených osob a shromáždění" nebo si létat někde na "širém poli" bez lidí a min. 150 m horizontálně od budov. Pro A2 (např. s možností letu do 30 m od osob) je pak nutná další písemná zkouška. Omezení AGL do 120 m (zatím mimo kluby) je hnusné, zejména pro nás modeláře s větroni. Nicméně prakticky kontrola asi nebude, jen když se něco semele nebo někdo někoho nabonzuje a bude vyšetřování. Celé eRules pro bezpilotní systémy (UAS) (nařízení (EU) 2019/947 a (EU) 2019/945) mají 277 (!!) stránek.
05.12.2020 Mikulášský vzlet s Commanderem u Kytína. Po delší době skoro jasno a "teplo" kolem 7 stupňů. Cvičení obratů, let 2x cca po 7 min.
04.11.2020 V pošmourném chladném listopadu létání s JET Viper viz video. Je to fakt radost, nejraději bych tam seděl v kokpitu. Ale ta přední sklápěcí řiditelná noha, to je dílo, to vymýšlel nějaký číňan. Je nutné rozebrat celý systém sklápění, aby šel vyndat a dorovnat drát na kterém je kolo upevněno. Bohužel si travnaté "letiště" nemohu vyasfaltovat a na břichu se mi přistávat nechce.
27.10.2020 V týdnu létání s Viperem korona nekorona - video ve fotogalerii. Měřil jsem rychlost pomocí GPS a tento JET model dosahuje 170 km/h, průměrně se rychlost pohybuje kolem 110 km/h. Je to energeticky náročné a doba letu je tudíž jen kolem 5 až 6 minut. Ale nízké průlety a zejména zvuk dmychadla jsou efektní a JET se stává mým oblíbeným. Model je tuhý a pěkně sestaven, krom obvyklé bolístky téměř všech modelů - předního kola. To je zasunovací a zároveň také řiditelné, ale drát držáku kola není kdovíjak silný a tuhý a každé tvrdší přistání nebo i vzlet z trávy znamená jeho deformaci. Budu to muset nějak předělat. U HABU jsem musel dát tužší drát a uchycení řízení předního kola upravit, aby se kolo neviklalo a drželo v nastavené poloze - zatím to přečkává i moje tvrdší travnatá přistání.
17.10.2020 První let s novým JET Viper a AKU 6S3300 u Kytína. Je sychravo, zima a těžké černé mraky hrozí deštěm. Ale let stojí zato, zvuk tohoto "vysavače" se blíží skutečné proudové stihačce a po větru dosahuje velmi slušné rychlosti. Ve vzduchu vypadá velmi pěkně, zejména se zataženým podvozkem je k nerozeznání od skutečného letounu. Ovládání jde naprosto svěle a základní akrobacie je "hračkou". Je obratnější a citlivější než HABU, doba letu je kolem 6 minut. Výhodou jsou klapky a to jak pro vzlet z trávy tak zejména pro možnost zpomalení na přistání. Změřil jsem odběr dmychadla a na plný výkon má 62 A což při 6S AKU (plně nabitý 25V) je příkon kolem 1340 W. Statický tak je 1400g.Při váze modelu s akumulátorem kolem 1600g to je již pěkný stroj.
12.10.2020 Let HABU JET s novým AKU 4S3000 - video ve fotogalerii. Už přišel podzim, 10 stupňů a sychravo. Měřím odběr dmychadla u HABU a na plný výkon a s 4S LiPo je to 65 A a příkon kolem 1kW. HABU citelně chybí klapky, zejména pro přistání.
10.10.2020 Neodolal jsem a dávám si další JET model od E-flite - JET VIPER EDF s 12 lopatkovým 70 mm dmychadlem, motor 2860-KV1850, 70 A ESC, rozpětí 1100, délka 1025 mm, zatatahovací podovozek, klapky, osazena digitální serva s kovovými převody. Sestavení je na pár šroubků, model vypadá moc hezky. Trochu složitější je jen potahování kabelů do trupu z odnímacího křídla (2x podvozek, 2 x klapky, 2 x křidélka). AKU používám GENS 6S/3300. Vplatila se pořídit plná verze s přijímačem Spektrum AR636 Jsem zvědav na zalétání a rychlosti.
27.09.2020 Nový přírůstek do letky, pořizuji JET HABU STS (verzi PNP bez přijímače) s 70 mm dmychadlem (EDF) od E-flite, motor 2847-3200Kv 6P + 70 A ESC, rozpětí 1000, délka 1140 mm. Sestavení je na pár šroubků, jednoduché kabelování přes konektory mezi trupem a křídlem. Přijímač dávám Spektrum AR610C. Model má sice slušnou rychlost a je poměrně živý na akrobacii, ale čekal jsem to ještě rychlejší. Průměrná rychlost je kolem 100 km/h na 3S. Tato rychlost by byla při nárazu do okolojdoucího "pejskaře" dost nebezpečná a je třeba maximální opatrnost při letu. Lepší hybnosti se dosahne s 4S LiPo. Při plném výkonu se mi ale dmychalo začalo zakuckávat, problémem budou moje 4S/2200 LiPo, které již něco pamatují. Pořizuji 4S/3000 a uvidíme. JET létá pěkně i při malých rychostech. Model je bez klapek, takže přistání jsou delší. Musel jsem předělat přední řiditelný podvozek, dát silnější drát a trochu celou nohu lépe upevnit.
20.09.2020 Během teplého září cvičná akrobacie a přistávání s Cirrusem. Přistávání dávám skoro na první dobrou.
03.09.2020 Večerní akrobacie s Commanderem u Kytín (2x9min). Bezvětří, 19°C, daleký dohled.
30.08.2020 Broušení akrobacie s Commanderem u Kytína.
23.09.2020 Létání ze Soliusem na Rovinách nad Brdy (poměrně větrno, bez termiky, do cca 300m). Sekám letiště.
10.08.2020 Začátkem srpna létání ze Soliusem u Telče a u Nové Vsi pod Pleší Teploučko a občas nějaká ta termika do 300m.
24.07.2020 Zalétání Soliuse dopadlo výborně, díky štíhlejším křídlům je svižnější než Heron a po vyvážení i pěkně plachtil. V kabině trupu Solius/Heron je málo místa, přijímač a GPS jednotku jsem umístil do kabiny k pilotovi, zespod jsou však antény odstíněné akumulátorem a občas mizel signál. Když jsem vystrčil antény přijímače ven z krytu kabiny, bylo vše OK.
22.07.2020 Na takové to domácí létání u Telče jsem složil Solius ze zbytků co jsem dostal od kolegy z Mníšku (křídla a kabina) a z mých zásob. Dokoupil jsem jen trup na Heron. Je to již moje čtvrtá skládačka tohoto typu - Heron/Solius. Poslední Heron odpočívá asi někde u Nového Knína v lesích či lukách. Soliuse (s motorem ze zásob - FOXY 2814/850) zalétám někdy o tomto víkendu.
14.07.2020 Létání s Proximou poprvé na stanovišti u Nové Vsi. Náběh na bouřku a nádherná termika, kroužení ze 100 do 500 metrů. Dalo poměrně "práci" Proximu dostat dolů, létala by asi navěky. Ale po 50 minutách už pilota bolelo za krkem. Pěkné letové video.
30.06.2020 Zalétání Proximy po opravě a vyvážení.
25.06.2020 Létání s Herostar (40 min letu, pěkná termika před bouřkou) a Proximou. Přetažení Proximy nízko nad zemí, pád do vývrtky a lehké naprasknutí trupu u kabiny. Spravil jsem laminováním
03.06.2020 Použitím starších křídel z Herona a trupu s motorem na pylonu, kýlovky a VOP z EasyStar vznikl "HeroStar". Křídla jsem zkrátil na celkové rozpětí 2050 (Heron byl 2400), plocha křídel je kolem 32 dm2 (EasyStar měl 28 dm2)a váha modelu bez aku je 950g, tedy o 200g více než EasyStar. Paty křídel jsem upravil tak, aby zapadly do trupu, spojení je ale už víceméně nerozebíratelné. Po prvním záletu musím konstatovat, že HeroStar se zadním pohonem létá a plachtí nádherně.
27.05.2020 Zálet Proximy po opravě. Větší sklon motoru se vyplatil, při plných otáčkách se již model tak nevzpíná. Těžiště se mi jeví trochu vpředu (ač je přesně na značce), asi ho posunu. Ale jinak krása, polojasno, mírný vítr a 20 stupňů, mírná termika, let kolem 25 min.
21.05.2020 Spektrum přestalo vyrábět seriové RC "race" přiíjmače se seriovým SRXL (SPM4649T - ten mi i s MATEK F 765 odletěl s Heronem v dál). Dají se sehnat jen nové "race" přijímače s vylepšeným SRXL2, např. SPM4650. Seriový SRXL2 protokol je sice lepší, obousměrný s podporou telemetrie, ale iNAV 2.4.0 ho zatím nativně nepodporuje :-(. Na https://github.com/MiguelFAlvarez/inav/releases jsme ale našel upravený release iNAV s jeho podporou. Po flashnutí HEX souboru s releasem do desky MATEK F405, kterou mám na modelu Twinstar, a přepnutí datového pinu přijímače SPM4650 z UART RX na TX, SRXL2 na FC funguje výborně. Muchas gracias Miguel!
19.05.2020 Létání s Proximou a Commanderem. Proxima se ale po jednom hodu prudce stočila doprava a přídí se zabořila kolmo do země - odešel náhle převod jednoho serva v křidélku, asi byl "načnutý". Křídla naštěstí bez úhony, odnesl to ale předek trupu několika menšími prasklinami a rozlepením špičky. Už je zalaminováno a vypadá to dobře. Při pádu se také odloupla z trupu motorová přepážka i s motorem. Přepážku jsem zpět do trupu zalaminoval s trochu větším sklonem pro vyosení motoru dolu, než bylo dříve (na plný plyn měl model dost tendenci stoupat). Čekám na vhodnou příležitost na zálet Proximy po opravě.
15.05.2020 Po měsíci létání s Heronem s FC MATEK F765/iNAV jsem se rozhodl upravit nastavení ReturnToHome. Pak jsem se vydal na zkušební let, dávám RTH a NIC! Zkouším failsafe a také nic. No a pak jsem s Heronem stratil kontakt, už jsem ho neviděl a ten si odletěl v poměrně silném větru neznámo kam směrem k Novému Knínu. Chyba, že jsem RTH nevyzkoušel v menší vzdálenosti mne stála model, kamerku MOBIUS MAXI, seriový přijímač SPEKTRUM (SRXL), desku MATEK F765 + modul GPS + HC-12, poměrně nový motor i s regulátorem, 6 serv a LiPo. Docela těžká ztráta. Zkoušel jsem ještě chytat telemetrický signál z HC-12 na 433 MHz, ale marně. Škoda, že jsem už neměl zabudovaný GPS IoT s LoRa, třeba bych chytil GPS. Možná Heron někdo najde jak před dvěma lety, ale nevím nevím, ve směru odletu jsou lesy a lesy.
26.04.2020 Výměna vyhořelého motoru u Heron (nový FOXY 2814/850 + 40 ESC - a najednou se z toho začalo kouřit..) a opětovné zalétání s MATEK F765 zcela OK.
18.04.2020 Vysekání letiště na Babinské a lety s Cirrus a Commaderem.
17.04.2020 Zalétal jsem Heron s MATEK F765 WING + iNAV 2.4.0. Povedlo se to na výbornou. Už po zapnutí základního modu stabilizace RATE byl znát velmi zklidněný let ve větru. Po zapnutí Horizon nebo NAV modů Heron držel "lajnu". Velmi dobré na letová videa nebo FPV. Driftování odstraní lepší vyvážení a vyrovnání desky FC na trupu. RTH fungovalo také OK. K FC bylo připojena i telemetrie přes 433MHz s moduly HC-12, zobrazovaná v CGS mwp na NB. Nezkoušel jsem "mission" lety.
10.04.2020 Do sbírky FC doplňuji MATEK F765 WING. Flashuji s iNAV 2.4.0. Destička má výkonější ARM procesor (STM32F765VIT6 / 216MHz / 512KB RAM / 2MB Flash), samozřejmě ODS pro FPV, sedm seriových portů a 12 PWM portů i spodporou DSHOT. Jako IMU je použit obvyklý MPU6000 (SPI1) & ICM20602 (SPI3) a pro barometr modul BMP280. Na UARTs seriové porty připojuji jako obvykle Serial Receiver SPEKTRUM, GPS modul Betian BN280. Navíc na další UART doplňuji modul HC-12 433 MHz pro spojení s mwptools a upload Way Point Missions a Bluethooth modul HC-6, případně i TRAMP OSD menu a DSHOT ESC Telemetry.Pro lety FPV mám kameru Foxeer Arrow (k desce lze připojit dvě kamery a dálkově je přepínat) a VTX Immersion RC TRAMP HV. Zamýšlím namontovat tento FC na Heron.
06.04.2020 Broušení akrobacie s Commanderem u Kytína. Řádí "koronavirus" a tak pilot nosí roušku. Začíná být krásně teplo a celý týden je modro. Adrenalinový Commander občas střídám poklidným plachtěním s Heronem.
28.03.2020 První letošní vyhození Horona. Let cca 20 min, fouká, ale poměrně teplo 16°C. V podvečer už žádná termika.
26.03.2020 Krom IoT sítě Sigfox ještě zkouším IoT síť LoRaWAN od ČRO /opět 868 MHz/ s modulem Arduino MKRWAN1300. A také brousím akrobacii s Commanderem u Kytína.
25.03.2020 V minulých dnech započala karanténa (koronavir) a zároveň se konečně umoudřilo počasí. Tedy čas na létání u Kytína. Sice občas fouká až dost a je ještě poměrně chladno, ale Commander to zvládá dobře. Včera se sice nepovedlo jedno přistání a odnesla to příď a vrtule, ale už je opraveno a dnes odpoledne už byl Commander ve vzduchu a moc si to akrobaticky užíval
04.02.2020 Testuji možnost nezávislého posílání GPS souřadnic, kdyby se se někam modýlek na své cestě zatoulal mimo dosah řídícího signálu. Nechci ale používat drahé GSM lokátory s ještě dražším měsíčním poplatkem za SMS. Tak zkouším modulek IoT SFM10R1 sítě Sigfox, ke kterému jde přes seriový port připojit jakýkoliv snímač. Tedy i GPS. Data s polohou poslaná přes IoT síť si lze přes HTTP POST přeposílat někam na webový portálek a tam ukládat/zobrazovat. Je to tedy nezávislé na dosahu ke Ground CS. Jistou nevýhodou Sigfox je malá rychost a objem přenášených dat 12 B, což je ale pro data GPS zcela dostačující. Z důvodu 1% duty cykling v bezlicenčním pásmu lze data posílat jen 6 x za hodinu. SigFox má na 868 MHz pokrytí ucházející. A stále fouká, na létání to není.
31.01.2020 Venku fouká vichr, létat se nedá. Chci si ytvořit funkční GCS (Ground Control Station) s iNAV, mwptools, MultiWii, LTM a dalších GNU projektů na GitHub.
21.01.2020 Ladím FC Matek F405SE s novým iNAV (2.30) s novým Twinstar s plováky na trávě. Sníh není, ale zima zima -1°C, na létání to fakt není, leda FPV z vyhřátého stanu.
03.01.2020 Zalétal jsme nově složený dvoumotorový Twinstar. Dle očekávání létá spolehlivě. Ještě pod trup doplním lyžiny resp. plováky. Osvědčilo se mi zapustit oba ESC (FOXY 35A) do křídel za gondoly motorů (motory - FOXY 2216/1050). Jeví se mi to lepší, než je mít až v trupu a k motorům na křídlech tahnout po třech fázích. K regulátorům je pak v křídle přívod od AKU (ztráty v tlustém kabelu nejsou velké, I max je kolem 25 A na motor) a řídící signál. V mohutném krytu kabiny jsem vyřízl místo pro signální kabely, přijímač nebo FC (nutno kabinu důkladně přichytit) a je tak vše přístupné zvenku. V trupu pod kabinou je schovaný jen AKU (GENS 3S 3300mAh). S plováky a s AKU má model 1650g. S FC, kamerou a FPV vysílačem o nějakých 150g více.
Created by © DuPe 2010-2021